Physical Work
PCBs, rockets, and robots. Everything that had to work in the real world.
PCB Design
Boards designed and fabricated for sensing, control, and IoT infrastructure. The S0 and S1 are open-source — schematics and layouts are public.
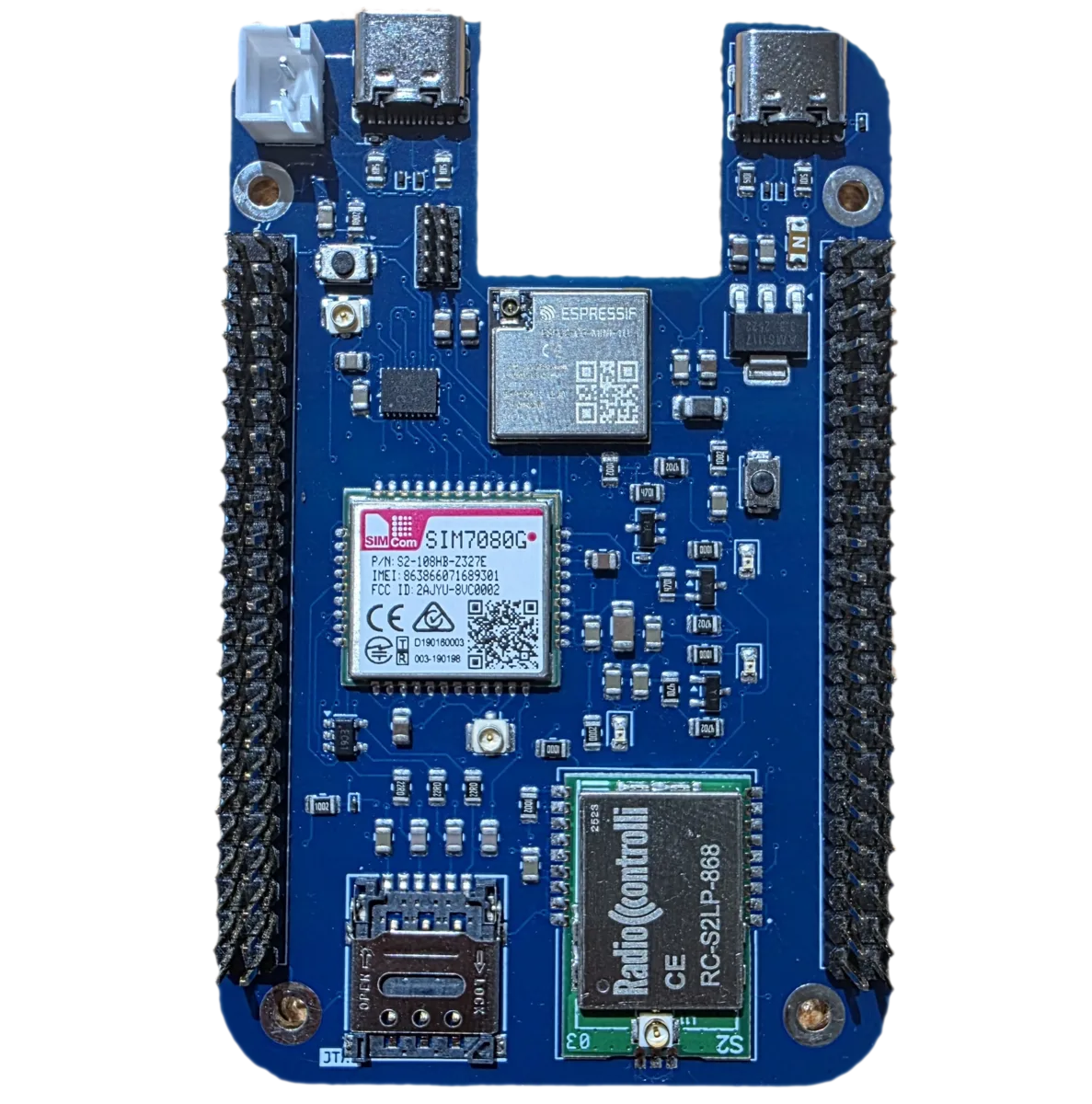
S0 IoT module — ESP32-C6, SIM7080G NB-IoT, and RC-S2LP-868 Wireless M-Bus on a single edge-connector board
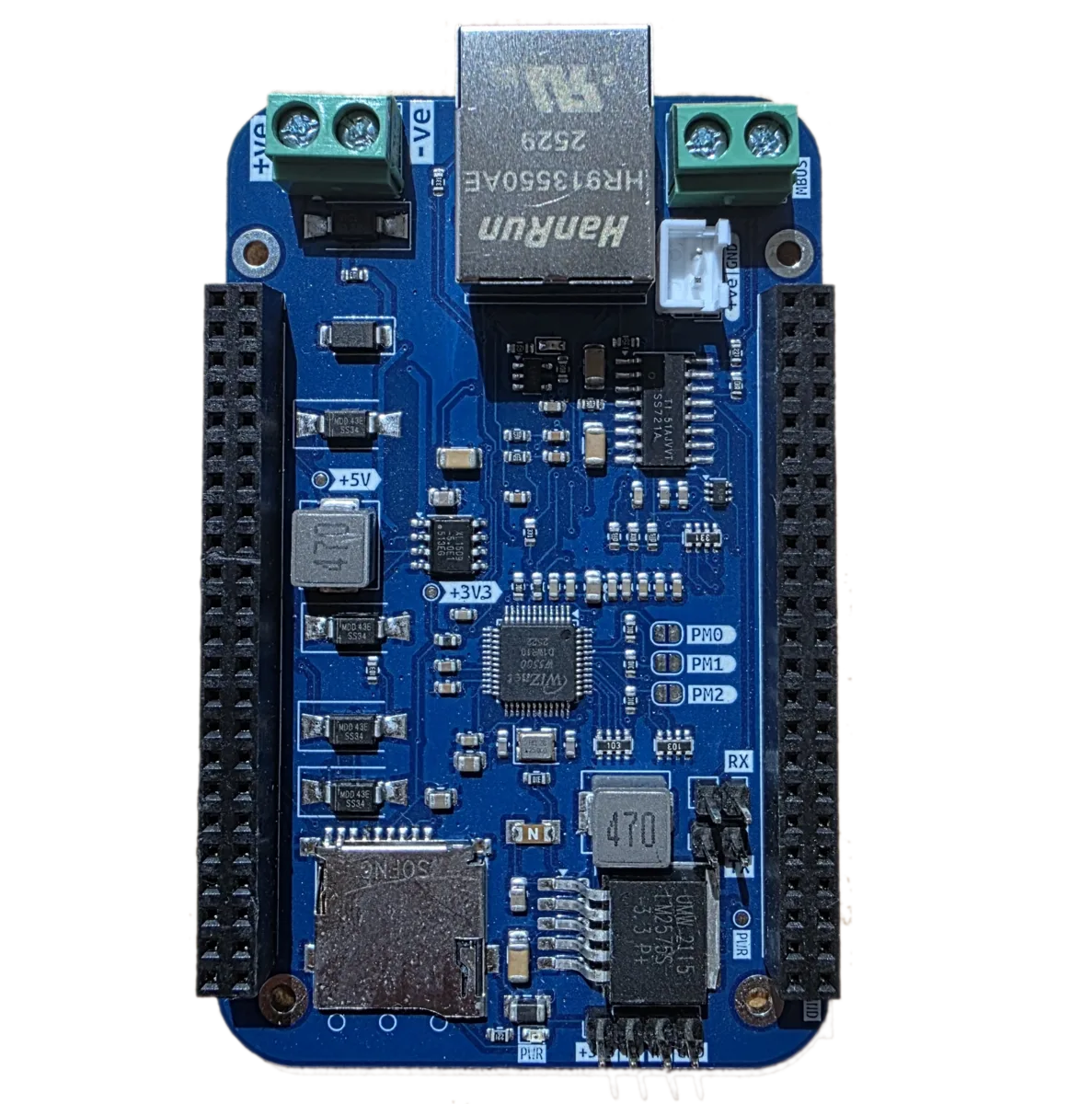
S0 baseboard — HanRun Ethernet jack, SD card slot, power regulation, and S0 edge connector

ESP32 control module — screw terminals, power regulation, and relay outputs for industrial control
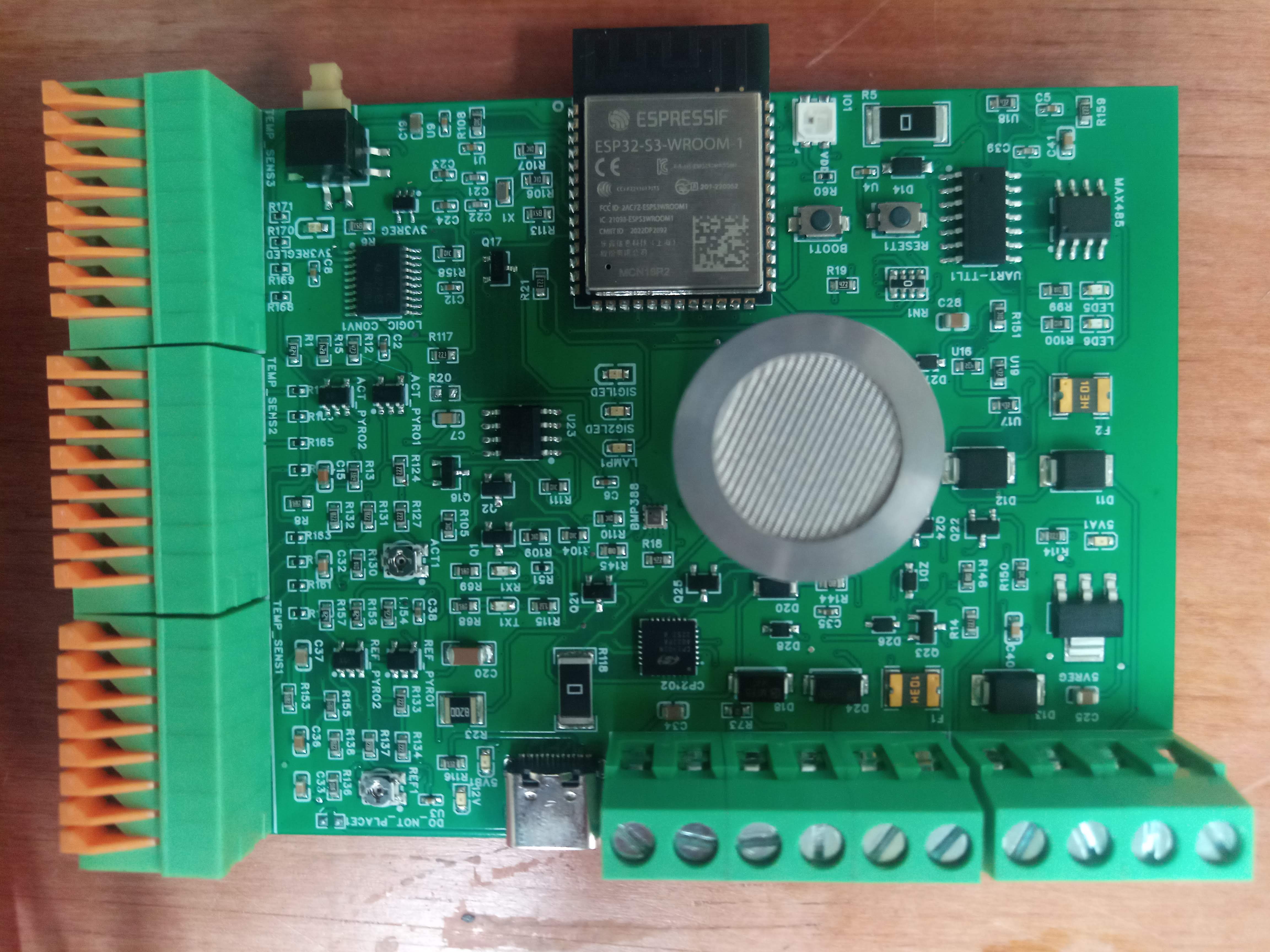
CO2 sensor module — ESP32-S3, electrochemical gas sensor, and field I/O terminals

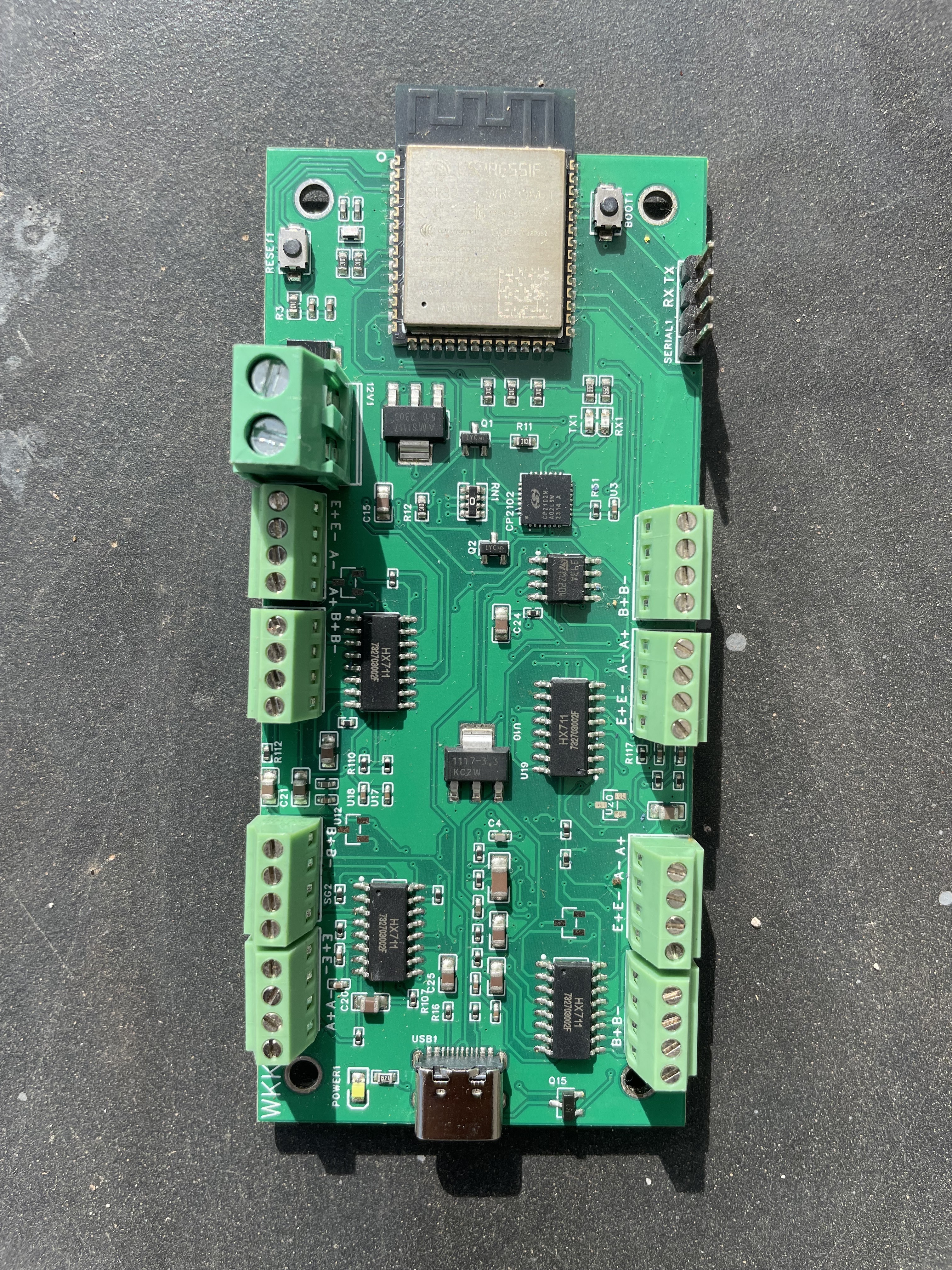
Main control PCB — ESP32-based controller with actuator I/O and sensor terminals
16-channel 24V digital input module — ESP32 WROOM, isolated inputs, and per-channel screw terminals
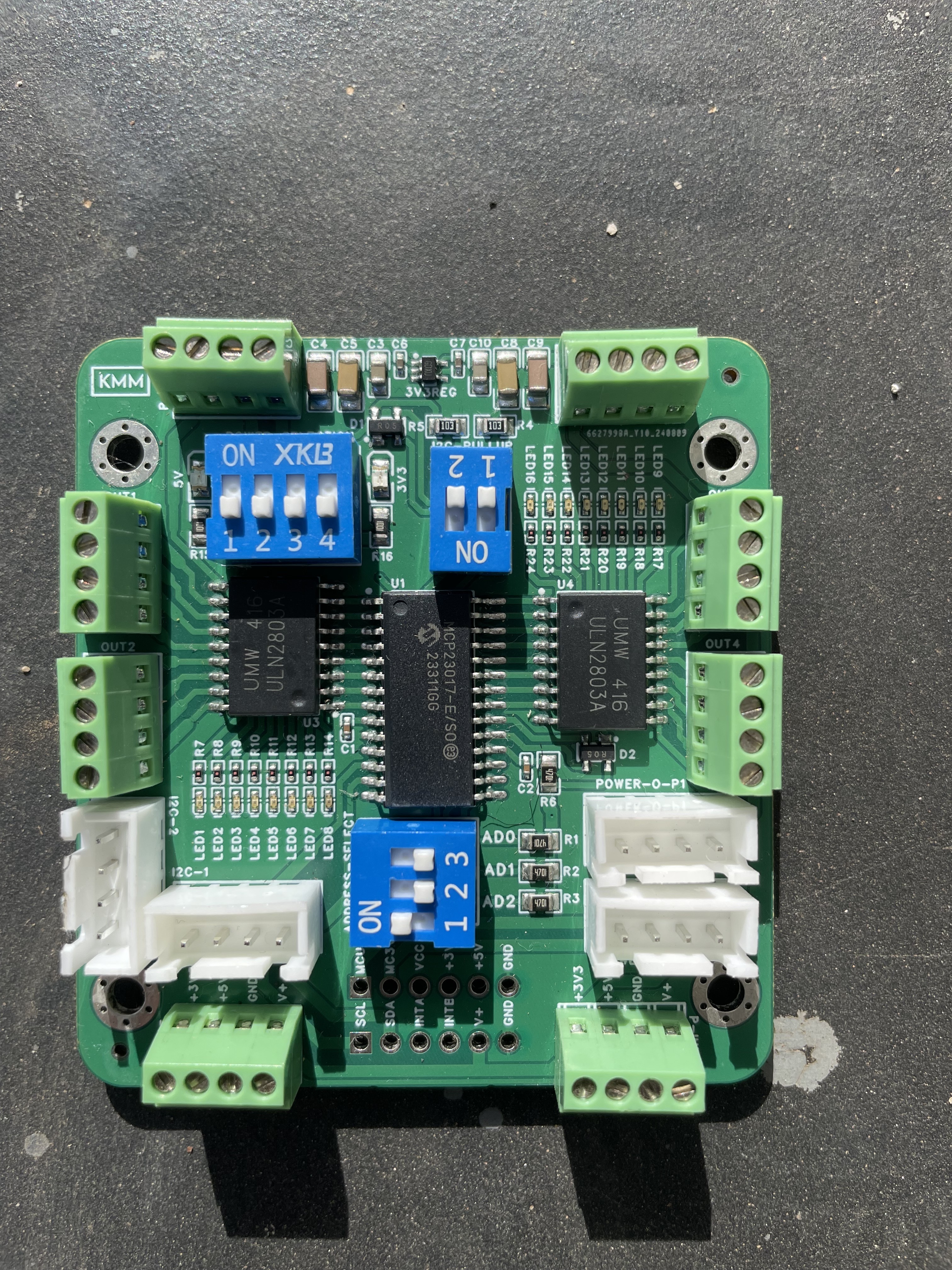
16-channel digital output module — shift register ICs, DIP address switches, and mixed JST/screw terminal outputs

32-channel RTD module
Per-channel signal conditioning, multiplexed ADC, and dense terminal block layout. Photographed after 450+ thermocyclic tests — ambient to 100°C+ — validating the design for long-duration deployment inside a direct air capture plant.
What 450 thermocycles did to my PCB →Nakuja Project
Kenya's first student-led sounding rocket program. I worked on propulsion — motor design, static fire testing, and data acquisition.
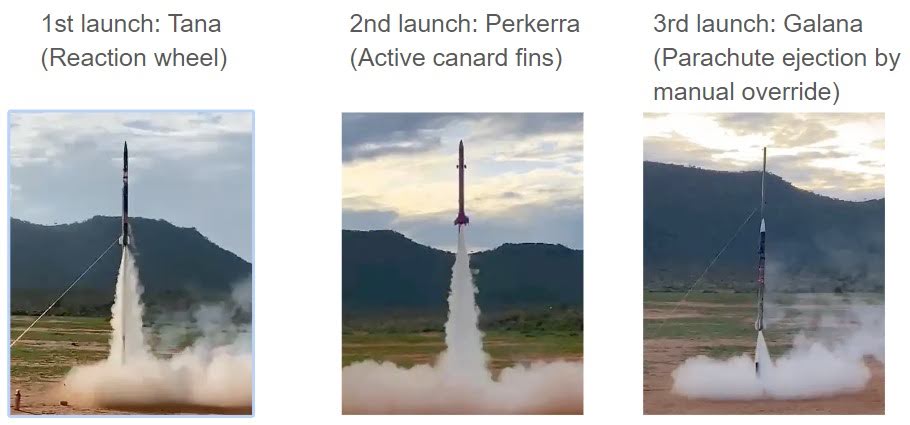
Three launches: Tana (reaction wheel stabilisation), Perkerra (active canard fins), Galana (parachute ejection)

N-1 and N-2 rocket models

N-1 launch prep in the field

Post-fire solid motor casing

Machined convergent-divergent nozzles

JKUAT Innovation Exhibits

Team design session

At Broglio Space Center, Malindi

Broglio ground station dishes

Broglio satellite tracking array
Undergraduate Thesis
Autonomous agricultural robot for maize field scouting. Tracked chassis, stereo depth camera on an elevated mast, onboard compute for row navigation and crop monitoring. JKUAT Mechatronics Engineering, 2022.
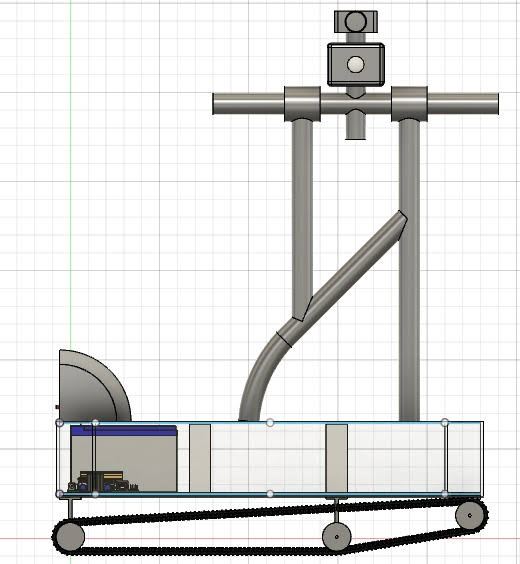
Side view CAD — tracked chassis with camera mast and audio deterrent module
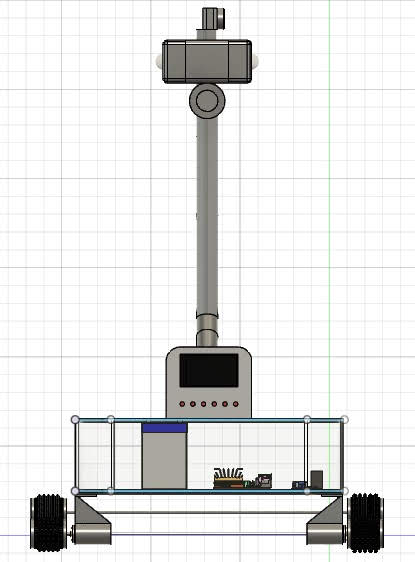
Front view CAD — display panel, sensor tower, and rubber track drivetrain
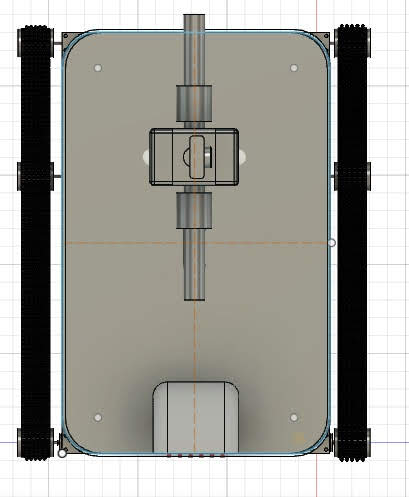
Top-down CAD — chassis layout with mast mount and dual track assembly

Robot navigating dense maize canopy, stereo camera scanning at row height

Front approach through maize rows, sensor mast rising above canopy

Platform at row edge, full maize test site in background

Row boundary positioning, wide-angle field overview

Autonomous traverse along open maize row, overcast field conditions

Navigating between young maize plants, sensor payload active

Full platform: tracked chassis, battery modules, sensor stack deployed in row

Drive detail: chain-driven rubber tracks, dual battery boxes with LCD readouts

Sensor tower close-up — stereo depth camera on adjustable mast mount

Final field trial frame, robot alongside mature maize plant